ありがとう ROSCon JP 2025!
ROSCon JP 2025は皆様のお陰で大盛況のうちに素晴らしいカンファレンスを終えることができました。 ROSCon JP 2025は289名の参加者、30社のスポンサー、そして開催スタッフと、有意義な時間をシェアすることができました。 開催内容や開催風景、アンケート結果については開催報告書をご参照ください。
スタッフ一同、心より深く御礼申し上げます。
次回のROSCon JPについては、後日決まり次第アナウンスします。

ROSCon JPは2025年9月9日(火)に名古屋で開催しました!
![]()
国際的なROS開発者会議ROSCon 2025の開催に先立ち、公式のローカルROSConイベントである日本版ROSConのROSCon JP 2025が名古屋で開催されます。 ROSCon JP 2025はOpen Roboticsとの共催で一般社団法人ROSCon JPが主催します。
ROSCon JP 2025
ROSCon JP 2025は丸一日ROSの最新トピックを学び、日本のROSコミュニティとの交流、初心者からエキスパートまで全てのROS開発者にとって素晴らしい機会を得ることができる場となるでしょう。 エキスパートからの様々な技術の話やROS通しか知らない話を聞き学ぶことができ、また開発者同士でアイデアを交換し合ったりすることもできます。
ROSCon JPはROSCon同様、PyConやBoostConをモデルとした開発者会議です。 これまでの本家ROSConは2012年から成功裏に開催してきた歴史があり、近年では1,000人以上の方が参加しています。 ROSCon JPは2018年から始まり、全ての開催イベントで200人以上の方に参加いただき、成功を収めてきました。
日本のローカルROSConであるROSCon JPは今年は名古屋で2日イベントとして終日開催し、過去の本家ROSConと同様に、参加者がまだ知らない最新ツールやライブラリに関する技術的な発表やチュートリアルで構成されます。 各発表は10分から30分の構成を予定しています(発表によってはより長いものであったり短いものであったりする可能性もあります)。
ROSCon JPは日本の老若男女全てのROSコミュニティのための開発者会議です。 私たちは職業、性別、住居などに関わらず、ROSに興味を持つ人全ての方にROSCon JPへの参加を検討していただきたいと考えています。 参加者のみなさまは行動規範に従うようにお願いします。
ROSCon JP実行委員会は女性や学生の参加を妨げる障害を取り除き、より多様性ある参加者を募りたいと考えています。 そこで、ROSConのプログラム同様にROSCon JPでもダイバーシティ奨学金プログラムを提供致します。 もし、より多様性ある参加者を募ることができるアイデアをお持ちの方がいらっしゃいましたら、ぜひご連絡ください。
ROSCon JPではライトニングトークと呼ばれる2、3分の短い発表を行うセッションを予定しています。 内容はROSに関係するものであればなんでも構いません。 もし正式な発表を望まれない方には、そのプロジェクトやアイデアをライトニングトークという形でカジュアルに発表することもできますので、ぜひご検討ください。ライトニングトークを行いたい方は、当日午前の最初のコーヒーブレークまでに発表登録を受け付ける予定です。
ライトニングトークには特別なフォーマットはありませんが、発表は共通のラップトップPCで順々に行うため、事前に発表スライドなどを提出いただく必要があります。ご自身のPCは使用できません。 スライドではなくビデオを流すだけでも構いませんが、必ず時間内に終了するように長さを調整してください。ただし、ビデオの音声は会場では聞き取りづらい可能性があるので、スライド中にビデオのURLを記載しておくと良いでしょう。 時間制約があるため、ライブデモを行うことはお勧めしません。
過去のライトニングトークの様子はROSCon JP 2024のウェブサイトもしくは過去のROSConイベントページをご確認ください。
参考に過去のROSConのプログラムや発表スライド、収録ビデオなどの情報をお探しの場合は、ROSCon JPとROSConの過去のウェブサイトをご参照ください。
ROSCon JP 2025の前日である2025年9月8日(月)にワークショップを行います。 内容の詳細はワークショップを参照ください。
スケジュール
ROSCon JP 2025 の各締切日等
講演申し込み開始
2025年3月31日(月)
講演申し込み締切
2025年6月2日(月)
ダイバーシティ枠申請締切
2025年6月30日(金)
講演採択発表
2025年7月7日(月)
参加登録開始
2025年6月16日(月)
早期登録締切
2025年7月25日(金)
事前登録締切
2025年8月29日(金)
ワークショップ
2025年9月8日(月)
カンファレンス
2025年9月9日(火)
スポンサー
プラチナスポンサー

ゴールドスポンサー

シルバースポンサー














ブロンズスポンサー









ダイバーシティ奨学金スポンサー制度
ROSCon JP実行委員会では本家ROSConと同様に、ダイバーシティ奨学金スポンサープログラムへのスポンサー支援を切に望んでおります。 ダイバーシティ奨学金プログラムは従来、ロボットコミュニティでの存在感が相対的に低かった人たちにもROSCon JPに参加していただき、すべての参加者にとって深くそして満足の体験を提供できることを念頭に設定されています。 ROSCon JPでは特に女性と学生に対しての参加費・渡航費支援のための奨学金としてに枠組みとしてこのスポンサー費を使わせていただきます。
開催会場&参加登録
参加費
2025年9月9日(火) プログラム参加
| 早期割引 | 事前 | 当日 | |
| ビジネス | 44,000円 | 55,000円 | 66,000円 |
| 個人 | 27,500円 | 38,500円 | 49,500円 |
| 学生 | 16,500円 | 33,000円 | 33,000円 |
9/8,9両日参加
| 早期割引 | 事前 | 当日 | |
| ビジネス | 77,000円 | 88,000円 | – |
| 個人 | 38,500円 | 49,500円 | – |
| 学生 | 22,000円 | 38,500円 | – |
注意事項
- 金額は消費税込です。参加費には、参加権の他に、ランチ・レセプションの食事、ノベルティが含まれます。なお、ランチ・レセプションはともに技術交流会であり、ROSCon JPのイベントにおいて重要な取り組みとなります。ぜひともご参加いただけますようお願いします。
- チケット購入後・参加費支払い後のキャンセルおよび返金は承りません。
- 「ビジネス」は、ROSを研究開発などの業務で使用されている会社員・研究者・事業主などの方に該当します。Peatixでのチケット購入の他に、請求書払いでの受付も承ります。「個人」とは、ROSを仕事ではなく個人的な事で使用されている方に限ります。「学生」の方は、当日受付で学生証等を提示いただきます。
- チケットの早期割引は 2025年7月25日(金) まで、事前登録の受付は 2025年8月29日(金) までとなります。事前販売でチケットが売り切れた場合には、当日販売は行いません。
- 2025年9月8日(月) に実施するワークショップに参加される方は、「9/8,9両日」の参加オプションを選択し、参加を希望されるいずれかのセッションを選択してください。ワークショップのみの参加はできません。参加申込は各セッションの定員までの先着順で受け付け、申込後のキャンセルや参加セッションの変更はできません。また、ワークショップの参加には事前準備や持参物が必要なため、当日販売は行いません。
チケット購入(参加登録)
参加チケットの販売を開始しました:
注意事項:チケットの早期割引は 2025年7月25日(金) までとなっております。
本場のROSConでもチケットは完売しており、ROSCon JP 2025も完売が予想されております。 チケットの追加販売は行う予定はございませんので、チケットが完売した場合、購入することはできなくなってしまいます。 参加を決めている方はお早めにチケットをご購入ください。
請求書払いをご希望の方
ROSCon JP 2025のチケット購入につきまして、請求書払いをご希望される方は、こちらのフォームより必要情報をご入力ください。入力後に請求書を送付致します。
【注意事項】
- 請求書払いをご希望されるかたは上記のPeatixのリンクから申し込まないでください。
- 請求書は原則発行から14日間有効です。有効期限内に振り込みがなかった場合、キャンセル扱いとなります。(期限の延長などはaccount@roscon.jpまでご相談ください)
- 恐れ入りますが、振込手数料はお客様負担でお願いいたします。
- 請求書払いの申込み時点でチケットの確保はされず、振り込み確認後に確定となります。タイミングによってはチケットを確保できない場合がございますので予めご理解の上、お申し込みください。
- その他の注意事項や振り込みの手順については、請求書の送付メールをご参照ください。
ダイバーシティ枠について
ROSCon JPではさまざまな人にも参加してもらいたいという理念から、ダイバーシティ枠を用意しております。 ダイバーシティとは、人種や国籍、性別や年齢、障害等の有無を問わずに、逆にその多様性を活かし、活動を深めていこうという取り組みです。 ROSCon JPでは、主に学生や女性への参加費・渡航費を支援するための枠組みとして設けています。
具体的には、次の支援策を予定しています。
- 学生(特に女性の方)のための参加費・交通費および宿泊費の支援
- お子様連れの方のための託児所の設置
ダイバーシティ枠の申請につきましては審査の上、採択致します。 また、申し込みが多数の場合には、対象者への支援額が一部となることがあります。 申請の締め切りは2025年6月30日(月) 17:00までとなります。 審査の結果は、7月7日(月)までにメールで連絡致します。
ダイバーシティ枠を申請される方は以下のフォームより申請してください。
開催会場
ROSCon JP 2025は名古屋のポートメッセなごや コンベンションセンターで開催します。
地図
プログラム
基調講演
ROSコミュニティを牽引する世界のトップリーダーをお招きします。 講演は英語で行われますが、質疑も含めて日本語との同時通訳を提供する予定です。
Michael Gentner (BMW Group, Robotics Research Engineer)

マイケル氏はBMWの次世代ロボティクスチームでロボティクス研究エンジニアを務めています。 専門は電気工学、ロボット工学、AIです。BMWの研究者として、主に品質検査の自動化のためのモーションプランニングや認識技術に取り組んできました。 彼のチームでは、複雑な手作業を自動化するためのロボットを開発し、これを生産現場に導入しています。 これらの活動の中で、彼らはロボティクスプラットフォームの活用を始め、その中でROSが重要な役割を果たしています。 最近では、VLAやその他の最先端技術を用いた産業用組立作業のための精微なマニピュレーションの学習に取り組んでいます。
Yadunund Vijay (Intrinsic, Staff Software Engineer)
ヤドゥ氏はオープンソースによるロボティクスの熱烈な支持者です。 Open Source Robotics Alliance (OSRA) ではROS 2とOpen-RMFのプロジェクト管理委員会 (Project Management Committee) の主要メンバであり、さらにOpen-RMFを代表して技術管理委員会 (Technical Governance Committee) を務めています。 ヤドゥ氏は "Iron Irwini" のディストリビューションではROS Boss(リードメンテナー)という重要な役割を担った経験があり、現在は "Rolling Ridley" のアップデートとメンテナンスの陣頭指揮を執っています。 彼の興味は、多様なロボットエージェントが通信できるようにすること、相互運用可能なソフトウェアを開発すること、知的な協調フレームワークを構築することに重点を置いています。 マサチューセッツ工科大学で修士号、シンガポール工科デザイン大学で学士号を取得しています。
タイムテーブル
2025年9月9日(火)のROSCon JP 2025のプログラムはシングルトラックで運営されます。 プログラム委員会 での審査により下記の発表が採択されました。 他にも、ライトニングトークのセッションを通じてコミュニティのメンバーに発信する機会があります。
プログラムは予告なく変更される場合があります。ご了承ください。
| Time | Presenter(s) | Title | Abstract | Resources |
|---|---|---|---|---|
| 8:00 | レジストレーション | |||
| 9:00 | オープニング | Slides Video |
||
| 9:10 | Michael Gentner (BMW Group) | 基調講演1: ROS in Manufacturing: From Interoperability to Physical AI (製造業におけるROS:相互運用性からフィジカルAIへ) |
本講演では、製造業が現在も直面している一般的な課題について整理し、ROSが次世代ロボットの実現にどのように役立つかを強調します。また、例えば検査やピッキング作業など、彼のチームがROSを使って取り組んでいるプロジェクトやユースケース、を紹介し、そこで得られた教訓も共有します。最後に、ROSを活用してインフラの大部分を構築した、フィジカルAIに関する最新のプロジェクトについてもご紹介します。 | Slides(TBA) Video |
| 10:00 | 井上 大輝 (株式会社ソミックトランスフォーメーション) | 製造業における ROS 2 活用:外観検査の自動化の実例紹介 | ROS 2 を活用した自動車部品工場における外観検査の自動化の実例を紹介します。また、ロボットアーム・グリッパ・外観検査カメラ・回転台などの機器の ROS 2 制御という技術的詳細や、なぜ ROS 2 を採用するに至ったのかの経緯を共有することで、製造業における ROS 2 活用の拡大の一助になることを期待しています。 | Slides Video Info |
| 10:20 | 土岐 勇介、山本 泰豊、森 大二郎 (レアゾンHI研究所) | OpenArm: オープンソースロボットアームの開発と応用事例の紹介 | 本発表では、高トルク・高制御周期を備えたオープンソースロボットアーム「OpenArm」の設計と、豊富なドキュメントによる普及への取り組みを紹介する。応用例として、力情報を取り入れた模倣学習とROS 2上での評価について述べる。 | Slides Video Info |
| 10:40 | 休憩 | |||
| 11:10 | 舘石 藍 (ソニーグループ株式会社)、楚 輝 (ソニーセミコンダクタソリューションズ株式会社)、三本松 利尚 (ソニーグループ株式会社)、新原 英樹 (ソニーセミコンダクタソリューションズ株式会社) | Isaac×ROS aibo シミュレーション環境 | aiboは22軸の自由度を活かした豊かな表現が可能なロボットであり、その物理シミュレーションにはIsaac SIMが活用されている。本発表では、Isaac SIM×ROSで構成されたaiboシミュレーション環境を紹介した上で、SIMの認識器開発プラットフォームとしての活用事例や、Isaac Gym/Lab によるモーションポリシー強化学習とその実機デプロイフローについて、知見も交えながら紹介する。 | Slides Video |
| 11:30 | 大西 史弥、髙橋 正樹 (慶應義塾大学) | DWPP: Dynamic Windowを用いた速度・加速度制約を考慮したPure Pursuitの提案とNav2プラグインの実装公開 | Pure Pursuit (PP) とその派生手法は現在も経路追従に広く使われており、ROS2の自律移動フレームワークNav2にも標準実装されていますが、速度・加速度制約を考慮できない課題があります。そこで、速度・加速度制約を考慮可能なDynamic Window Pure Pursuit (DWPP)を提案し(査読付き国際会議採択済み)、そのNav2プラグイン実装を公開します。本発表では、PPと派生手法の解説、DWPPの実機検証結果およびNav2への導入方法を紹介し、経路追従手法の理解と導入に貢献します。 | Slides Video Info |
| 11:50 | 橋本 千聡、高野 大河、有川 康幸 | Minecraftを活用したROS 2初学者教育支援拡張機能「minecraft_ros2」の開発と実践 | 近年ロボット需要の高まりとともに人材不足が懸念されている。そこで、MinecraftとROS 2を連携させる拡張機能を開発し、ゲーム内の動作とROSメッセージの相互通信を実現した。ゲーム内の動作を通して、ロボットに詳しくない初学者でもROS 2を使った座標変換などの概念を学ぶことができる。本講演では、minecraft_ros2の説明や実際に教育に活用した例を紹介する。 | Slides Video Info |
| 12:00 | ランチ | |||
| 13:30 | Yadunund Vijay (Intrinsic) | 基調講演2: Building robots with ROS 2 and rmw_zenoh (ROS 2 と rmw_zenoh を使用したロボットの構築) |
本講演では、ROSを活用して実製品レベルの産業用ロボットソリューションを開発するための指針を提供することを目的とし、現代における通信の課題に対応できる堅牢なミドルウェアであるrmw_zenohを紹介します。rmw_zenohが提供する卓越した柔軟性について深く掘り下げ、高頻度センサデータから低遅延制御まで、多様なデータストリームの伝送要件に完璧に適合するように、トピックごとに通信経路をカスタマイズできる仕組みを解説します。この基盤を基に、Zenohルータが強力なゲートウェイとして機能し、ロボット内部のカスタマイズされたネットワークと外部世界をシームレスに接続する方法を示します。このアーキテクチャは、複数のロボットを接続しクラウドシステムと統合するための堅牢でスケーラブルなパスを提供し、洗練されたソリューションを高信頼に構築・展開する能力を提供します。 | Slides Video |
| 14:20 | 西下 敦青、池田 勇輝、加藤 裕基 (JAXA (宇宙航空研究開発機構)) | 宇宙アプリケーションへのROS適用に向けた取り組み:RACS2によるcFS-ROS2連携のISS軌道上実証 | JAXAでは宇宙用ソフトウェアフレームワークcFSとROS2を連携させるブリッジパッケージRACS2を開発した。RACS2を活用することで,宇宙用OBC上に搭載するミッションクリティカルな機能はcFS上で実装し,非クリティカルかつ複雑な処理はROS上で開発するという機能分担が実現でき,宇宙ミッションの幅が広がることが期待される。本発表ではISSに配備されたカメラロボットInt-Ball2を用いて,RACS2のISS軌道上技術実証を行った結果について紹介する。 | Slides Video |
| 14:40 | 有川 康幸、富永 康太、岩崎 雅弘 (京都工芸繊維大学) | NHK学生ロボコンに向けたソフトウェア開発と教育から得られた知見 | 京都工芸繊維大学のロボコンチーム「ForteFibre」における、NHK学生ロボコン出場を目指したソフトウェア開発と教育体制の整備について紹介する。学生主導の開発における課題とその解決、ROS 2の活用とロボコン向けソフトウェアライブラリの整備、教育カリキュラムの工夫などを通じて得られた知見を実例と共に共有し、企業における開発手法との共通点や違いも議論する。 | Slides Video |
| 14:50 | (当日午前中に発表者受付) | LT(ライトニングトーク) | - ROSCon JP 2025 Workshops:Slides - Open Source Robotics Allianceの状況報告:Slides - 学ロボ2025活動紹介:Slides - ROS制御の産業用システムへの導入加速!:Slides - カチャカを使った研究開発・ROS 2教育をアシストするkachaka-ros2-dev-kit:Slides - BotWheel Explorerでつくばチャレンジに参加する話:Slides - OUXT Polaris:Slides - MATLAB と ROS 2 連携:Slides - 建設現場におけるROS2を使った自動化・遠隔化の紹介:Slides - 新製品開発に向けた実証実験:Slides - 物理エンジン AGX Dynamics の紹介:Slides - ROS 2 Persistent Parameter Server:Slides - TGMGP:Slides - 中小規模生産ラインの労働力不足を解決するロボットパッケージ:Slides - 未来への一瞥・AIとMCPによるロボット開発:Slides ※以降はセッション時間切れのためスライド公開のみ - ROS2を用いたPFAS前処理装置の開発:Slides - RTMaps GUIによるROSノードのトピック接続設計:Slides - カチャカと ROS 2 でゲームを作って子供たちに遊んでもらいました:Slides |
Video |
| 15:30 | 休憩 | |||
| 16:00 | 満留 諒介 (The Autoware Foundation) | Autoware Core:自動運転のための安定したROS 2ベース基盤 | 自動運転のOSSであるAutowareは2015年の公開以降、機能の拡充により複雑化し、保守性に優れたアーキテクチャの必要性が高まっていた。これを受けて、従来のAutowareから自動運転に不可欠な基本機能のみを抽出し、軽量かつ安定した基盤として「Autoware Core」をリリースした。本講演では、Autoware Coreのアーキテクチャおよび開発プロセスについて紹介する。 | Slides Video Info |
| 16:30 | 石郷岡 祐 (Astemo株式会社) | Software-Defined Vehicle向けのクラウドネイティブ開発環境におけるDeterminismの改善 | 自動車分野ではクラウドを利用したソフト開発が加速している。本発表ではクラウド内に構築した仮想コントローラ内で開発したソフトをクルマで動作させるときの課題について、Software-Defined VehicleのSOAFEEコミュニティが提案するクラウドネイティブ開発環境と、ROS2ベースの自動運転OSSであるAutowareを事例に述べる。そして解決案をROS2ノード実装例と共に紹介する。 | Slides Video |
| 16:50 | 石川 貴大 (TIER IV, Inc.) | CallbackIsolatedExecutor: 二重スケジューリングを不要にする新しいExecutorとスケジューリング理論 | 本発表では、コールバックにOSスケジューラのパラメータ (優先度など) を直接設定できる新しいExecutorを紹介します。REP-2017と類似していますが、独立したパッケージであり、rcl等への変更が不要である点が異なります。ROS 2のリアルタイムスケジューリング理論にて、十年弱研究された二重スケジューリングが不要であると示す論文が、同分野トップ学会RTAS 2025に採択されています。 | Slides Video Info |
| 17:10 | 単 顕迪、笹竹 晴萌、但馬 竜介 (TechMagic Inc.) | lazyros:ターミナル1つでROSのほぼ全てを管理するツール | ノードの起動管理やトピックなどの通信状況を表示できるCLIツールを紹介します。ノードの数が増えるにつれて、使用するターミナルの数は増加し、目的のノードが起動しているターミナルを見つけるのが困難になります。 本ツールは1つのターミナル上で、全ノードのログやトピックの表示、ノードの起動・停止、さらにライフサイクルノードの状態遷移を一括で操作可能です。これによりROSシステムの開発における煩雑さを軽減可能です。 | Slides Video Info |
| 17:20 | 藤田 智哉 (Sony) | ROS Japan Developer 会議 | ROS Japan Developer 会議は、日本のROS開発者が技術課題や改善提案を共有し、ROS本体の開発に貢献することを目的としたコミュニティ会議です。本発表では、設立の背景/動機、活動内容、などを説明します。 | Slides Video Info |
| 17:30 | クロージング | Slides Video |
||
| 17:40 | 休憩 | |||
| 18:00 | レセプション・ネットワーキング | |||
| 19:30 | 終了・完全撤収 |
ワークショップ
ROSCon JP 2025の前日である2025年9月8日(月)には、ROS(Robot Operating System)に関するワークショップを開催します。 次の3つの内容をパラレルセッションで実施します。
- ワークショップA: AIジェスチャー認識・人体ボディ認識によるロボット駆動(定員10名)
- ワークショップB: Autowareで始める自動運転開発入門(定員20名)
- ワークショップC: ROS 2とモデルベースデザイン(MBD)の実践入門(定員30名)
ワークショップには別途で参加費が必要です。 ROSCon JPの参加登録時点で「9/8,9両日」の参加オプションを選択し、参加を希望されるいずれかのセッションを選択してください。ワークショップのみの参加はできません。
参加申込は各セッションの定員までの先着順で受け付けます。 申込後のキャンセルや参加セッションの変更はできません。
ワークショップA
AIジェスチャー認識・人体ボディ認識によるロボット駆動
本ワークショップでは、ROS 2/Humble上でAI画像認識によるジェスチャー判別でのロボット制御(ロボットのカメラに向かって手で指示をするとロボットが動く)、人体ボディ認識によるロボット制御(ロボットが人体を判別して追いかけてくる)を行います。
本ワークショップの教材には、次のロボット/ツールを使用します。
- ロボット教育キットOriginBot International version (貸出)
上記ロボットには以下が搭載されています- RDK X5開発ボード
- USBカメラ
- ROS 2 Humble

本ワークショップの演習にあたって、受講者は次の環境のPCを用意して持参いただく必要があります。
- 下記いずれかのOSのノートPC
- Windows 11
- macOS (AppleSiliconモデル)
- Ubuntu 22.04 LTS
- 有線LANポート付きのもの(USB変換アダプタでも可)
- RDK Studio(導入手順は開催の約2週間前に案内します)
対象者:
- 上記の環境を自身で用意・持参いただける方
- ROS 2 Humbleの公式チュートリアルの内容を “Beginner: CLI tools” まで理解されている方
- ROSを用いたロボット開発に興味のある方
| Time | Title |
|---|---|
| 12:30 | 受付開始 |
| 13:00 | ROS 2概論・TogetherROS環境、OriginBot教材概要紹介 |
| 13:40 | OriginBotの設定 |
| 14:00 | ジェスチャー認識・人体認識の実行 |
| 16:00 | RDK StudioとVNC-Linux Desktopによるロボット開発方法 |
| 16:30 | ロボット駆動のプログラミング |
| 17:30 | 発展的な話題 |
| 18:00 | 終 |
ワークショップB
Autowareで始める自動運転開発入門
本ワークショップでは、ROS 2とAutowareを用いた自動運転開発に関する講習会を実施します。Autowareを軸とした座学と実践的な演習を通して、自動運転システム構築に役立つROS 2の機能から、シナリオを用いた自動運転のシステム評価までを幅広く学びます。
本ワークショップの教材には、次のツールを使用します。
- Autoware
- “Autoware” はThe Autoware Foundationの商標です
- シナリオエディタ
- ブラウザ上で動作するツール(Google Chrome推奨)
- 個人TIER IVアカウント(無料)が必要

本ワークショップの演習にあたって、受講者は次の環境のPCを用意して持参いただく必要があります。詳細な導入手順は開催の約2週間前に案内します。
- Ubuntu 22.04 LTS (ネイティブインストールされたもの・Docker等の仮想環境は不可)
- ROS 2 Humble Hawksbill
- Autoware
- Google Chrome
- TIER IV アカウント(個人版)
- 無線LAN
対象者:
- 上記の環境を自身で用意・持参いただける方
- ROS 2 Humbleの公式チュートリアルの内容を “Intermediate” まで理解されている方
- 自動運転・Autowareに興味のある方
- ROS 2を使ったシステムの開発・評価に興味のある方
| Time | Title |
|---|---|
| 12:30 | 受付開始 |
| 13:00 | 講義: - Autowareの概要 - 自動運転システム構築に役立つROS 2の機能・ツール - シナリオを用いた自動運転のシステム評価 |
| 14:00 | 開発用シミュレータを用いたAutoware体験演習: - セットアップの確認 - シミュレータを用いた基本的なAutowareの動作と機能の確認 |
| 15:30 | シナリオシミュレータを用いた自動運転テスト演習: - サンプルシナリオを用いた自動運転テスト体験 (例:障害物停止・路肩駐車・信号機・障害注入) - シナリオエディタを用いた応用シナリオテストの作成 |
| 17:00 | 発展的な話題・実演デモ |
| 18:00 | 終 |
ワークショップC
ROS 2とモデルベースデザイン(MBD)の実践入門
モデルベースデザイン(MBD)は、開発対象を数式などのモデルで表現し、シミュレーションを活用して設計や検証を行う開発手法です。従来の実機検証中心の開発では、不具合の発見が後工程に偏り、修正コストが高くなる課題がありました。MBDを用いることで、開発の初期段階からシミュレーションによる検証が可能となり、不具合を早期に発見・修正できるメリットがあります。
MBDはこれまで主に制御設計分野で利用されてきましたが、近年ではロボティクス分野での活用が期待されており、ROS 2との連携がますます重要になっています。
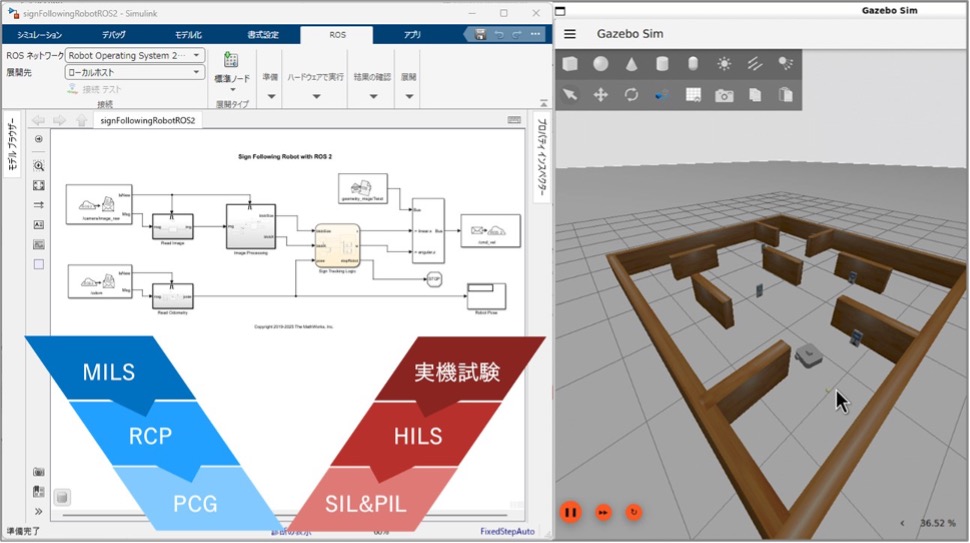
本講習会では、MBDの基礎をはじめ、移動ロボットのモデリング、MILS(Model In the Loop Simulation)による仮想試作・検証、さらにROS 2と連携した並列実行(SILS/RCP/HILS)の一連の開発ワークフローを学びます。開発ツールとしてはMATLABおよびSimulinkを使用し、講師はMathWorksのエンジニアが担当します。
本ワークショップの教材には、次のツールを使用します。
- シミュレーター利用 (ROS 2 Jazzy + Gazebo Harmonicで構築したものを予定)
- MATLAB R2025a (1か月間利用可能な試用版提供)
本ワークショップの演習にあたって、受講者は次の環境のPCを用意して持参いただく必要があります。
- メモリ16GB以上、ストレージ32GB以上(SSDを強く推奨)
- Ubuntu 24.04 LTS (ネイティブインストールされたもの・Docker等の仮想環境は不可)
- ROS 2 Jazzy Jalisco
- MATLAB R2025a(1か月間利用可能な試用版をMathWorksから提供・導入手順は開催の約2週間前に案内します)
対象者:
- 上記の環境を自身で用意・持参いただける方
- ROS 2 Jazzyの公式チュートリアルの内容を “Beginner: CLI tools” まで理解されている方
- MATLAB入門とSimulink入門 (いずれも無料)を事前に実施いただける方
| Time | Title |
|---|---|
| 12:30 | 受付開始 |
| 13:00 | 講義:モデルベース開発(MBD)の概要とROS 2との連携についての解説 |
| 14:00 | 操作体験: - 講習会用シミュレーターと開発環境の確認 - 講師による実機デモンストレーション - ros2bagの保存、RViz2での可視化、rqtによるtopicやnodeの確認 - シミュレーターとの連携(topic/service/action) - ros2bagの読み込みと可視化、解析 - ROS 2 C++ノード/ROS 2 CUDAノードの生成とcolconでのビルド、スタンドアローン実行 - ロボットのナビゲーション課題に取り組み (SLAM/自己位置推定/制御/AI) |
| 17:00 | 発展的な話題・実演デモ |
| 18:00 | 終 |
講演募集
投稿締切: 2025年6月2日(月)
※講演提案の募集は締め切りました。ご提案をありがとうございました。
ROSに関連する講演を募集します。 例えば、ROSのパッケージやライブラリ、ツールの紹介や使用方法、センサーデータの利用方法等のロボット向けのアプリケーション類、ロボット開発のベストプラクティス等を期待しています。 日本人向けの会議なので、提案も講演も日本語です。 英語ができない方も気軽に応募ください。 講演の長さは短くても長くても構いません。 本家のROSCon 2025に講演申込みするつもりの方も、同じ内容を日本語でもプレ発表することを歓迎します。 また、ROS Japan Users Group (rosjp)等で発表済みの内容を提案したい場合は、新しい情報や詳細な説明の追加を期待します。
ROSCon JPでは、ダイバーシティを重視しております。幅広い層からの応募をお待ちしております。
応募された内容は、プログラム委員会が評価し、採択を決定します。 (内容のインパクトと独自性、ROSCon JPでの講演にふさわしいか、オープンな内容であるか等、バランスを勘案して決定する予定です。)
ROSCon JPで発表したい方は、ぜひご応募ください。 もし、何らかの特別な事情がある場合は、締切まで余裕を持って実行委員会までお問い合わせください。
日本人向けの会議なので、発表は日本語です。
対象分野
ROS、Gazebo、Open-RMF に関連するすべての内容を募集します。トピックの例を示します。
- 新しいパッケージやフレームワーク、ツールの提案や紹介
- 既存のパッケージやフレームワーク、ツールの改善や有用な使用方法の紹介
- ロボットに特化した開発事例、ベストプラクティス
- シミュレーション
- 安全とセキュリティ
- 組込み技術
- 実証実験事例
- 製品開発と商品化、ビジネスでの利用事例
- 研究成果や教育での利用事例
- コミュニティと方向性の議論
- 試験、品質、ドキュメント類
- ロボット競技会等での経験の共有
ROSConにふさわしいコンテンツの例は、過去のROSCon JPのスライドとビデオアーカイブをご覧ください。
投稿フォーム
【募集期間は終了しました】
投稿フォームに記載いただく項目の要点は次のとおりです。
- タイトル(題目)
- 発表者・提案者(氏名と所属)
- 希望する講演枠:ショート(〜10分)/ミディアム(〜20分)/ ロング(〜30分) ※質疑や議論の時間も含みます。
- サマリー(200文字以内):ウェブサイト等で講演の紹介に使います。
- 提案内容:概要、目的(視聴者の利益)、議論のポイント等
プログラム委員会がプレゼンテーションの重要性と貢献を評価するための十分な情報を必ず含めてください。 提案フォームに記載された情報のみで査読を行いますので、これに必要十分な内容を記載してください。 コードリポジトリやデモンストレーションビデオなど、公開されているリソースへのリンクは特に役立ちます。
ROSCon JP 2025の講演提案の投稿フォームである HotCRP は英語で提供されています。
日本語によるガイドをまとめた Google Documentsをご参照ください。HotCRPのログイン方法を含む使い方、講演提案の申込時の記載項目、よくあるご質問などをまとめています。
重要日程
※講演提案の募集は締め切りました。
- 投稿締切: 2025年6月2日(月)
- 採択発表: 2025年7月7日(月)
ワークショップ募集
提案締切: 2025年3月31日(月)
※ワークショップ企画の提案募集は締め切りました。ご提案をありがとうございました。
ROSCon JP 2025の前日である2025年9月8日(月)にはROS(Robot Operating System)に関するワークショップを実施予定です。
今回は、このワークショップの企画内容をひろく募集いたします。日本人向けの会議なので、提案も実施も日本語です。
様々なトピックを短めの時間で幅広く扱うものではなく、特定のトピックに関して長い時間(最大で半日を想定)で深堀りするような企画を想定しています。これまでのROSCon JPでは参加者が手を動かして技術を身につけるハンズオン形式のものを実施してきましたが、複数名による講演・チュートリアル形式やパネルディスカッション形式も歓迎します(商用製品・サービスの宣伝のみの内容の提案はご遠慮ください)。
ROSCon JPでは、ダイバーシティを重視しております。幅広い層からの応募をお待ちしております。
企画内容と実施形式については、実行委員会とのインタビューやミーティングの機会を設定しながら、共同で詳細を検討させていただければと考えています。企画実施にあたっての要望などがありましたらぜひご相談ください。現時点では概要レベルの提案で構いませんし、このようなワークショップに参加したいというアイデアレベルの提案も歓迎いたします。
実施概要
- 日程:2025年9月8日(月)
- 時間:13:00-18:00(1時間から最大5時間の想定・企画内容に応じて分量を相談)
- 会場:ポートメッセなごや
- 想定する参加者数:10名から最大50名程度(先着順での受付予定)
- 参加費:検討中(カンファレンスとは別途で参加費が必要であり、ワークショップのみの参加受付は想定していません)
- 開催にあたっての費用負担:講演者等の旅費は実行委員会で負担可能です。ロボット等の高額機材が必要な場合は提案者に準備いただきたく考えていますが、詳細はご相談ください。
スケジュール(予定)
- 2025年3月31日(月):提案フォームでの募集の締切
- 提案受付後〜4月中:提案者と実行委員会との概要検討・実施企画の決定
- 〜5月中:実施内容の詳細検討
- 2025年6月2日(月):ROSCon JP Webサイトなどでの開催内容の情報公開
- 2025年6月16日(月):参加登録開始
- 2025年9月8日(月):ROSCon JP 2025ワークショップ開催日
参考情報
過去のROSCon JPでのワークショップ・講習会の実施内容です。企画検討の参考材料としてご参照ください。主なトピックは過去に実施したものと重複していても差し支えありません。
- ROSCon JP 2024:SLAM技術の理解と実装
- ROSCon JP 2023:ROS 2の組込みマイコン向け技術の紹介
- ROSCon JP 2019:ROS 2の基本と移動ロボットへの応用
関連情報
実行委員会
- ジェフ ビグス
- 江頭宏和
- 中川友紀子
- 近藤豊
- 高瀬英希
- 中村匠
- 吉本幸太郎
プログラム委員会
- 池田 勇輝
- 石郷岡 祐
- 岡田 佳都
- 片岡 大哉
- グエン ジュイヒン
- 近藤 豊
- ジェフ ビグス
- 高瀬 英希
- 但馬 竜介
- 野村 弘行
過去のROSCon JP
- ROSCon JP 2024 東京
- ROSCon JP 2023 東京
- ROSCon JP 2022 京都
- ROSCon JP 2021 東京
- ROSCon JP 2019 東京
- ROSCon JP 2018 東京
過去のROSCon
ROSConは国際ROS開発者会議として2012年から開催されています。 過去のROSConのアーカイブもあります。
- ROSCon 2024 デンマーク
- ROSCon 2023 ニューオーリンズ
- ROSCon 2022 京都
- ROS World 2021 オンライン
- ROS World 2020 オンライン
- ROSCon 2019 マカオ
- ROSCon 2018 スペイン、マドリッド
- ROSCon 2017 カナダ、バンクーバー
- ROSCon 2016 韓国、ソウル
- ROSCon 2015 ドイツ、ハンブルグ
- ROSCon 2014 アメリカ、シカゴ
- ROSCon 2013 ドイツ、シュトゥットガルト
- ROSCon 2012 アメリカ、セントポール
Social Media
![]()
#ROSConJP2025 #ROSConJP #rosjp
Code of Conduct
ROSCon JPの運営がスムーズかつ全ての人に公平なイベントになるために、全ての参加者は行動規範(コード・オブ・コンダクト)に従っていただきます。
この会議ではすべての参加者、スピーカー、スポンサーとボランティアは以下の行動規範に従うことへの同意を必要とします。会議主催者は会議の間を通じてこの規範の実施を徹底します。私達主催者は誰にとっても安全な環境を確約するためにすべての参加者が協力することを期待しています。
行動規範
ハラスメント行為には、言葉による性別、性的指向、障碍の有無、外見、身体の大きさ、人種、宗教に関する攻撃的なコメント、公的空間での性的な映像表現、意図的な威力行為、ストーキング、つきまとい、写真撮影や録音によるいやがらせ、トークやその他の会議イベントに対して繰り返して中断しようとする行為、不適切な身体接触、そして望まれない性的な注意を引きつける行為を含みます。
参加者は、これらのハラスメント行為を止めるように求められた場合、すぐに従わなければなりません。
スポンサーもまた反ハラスメント行為ポリシーに従わなければなりません。特に、スポンサーは性的な関心を引き起こす映像表現、活動、あるいはその他の物品を使うべきではありません。ボランティアを含め、ブースのスタッフは、性的な関心を引き起こすような服装/制服/コスチュームを使うべきではありませんし、その他の手段で性的な関心を引き起こすような環境を作ることもすべきではありません。
参加者がハラスメント行為に属するふるまいをした場合は、会議主催者は適切と判断した範囲で、当該行為を行った者に対する警告や、参加費を返還せずに会議から追放処分とするなどを含むいかなる行動も取ります。
もしあなたがハラスメントに遭った場合、他の人がハラスメントに遭っている場合、あるいは他に気になることがあった時は、すぐに会議スタッフの誰かに連絡していただくようお願いします。会議スタッフは会議のブランドを付けたTシャツを着ています。
会議スタッフは、ハラスメントを経験した人が、会議期間中安全かつ安心と感じられるように、参加者がホテル/会場の警備や近隣の警察に連絡すること、付き添い者の提供、およびその他の支援を行います。私達にとってあなたが参加しているのは大事なことなのです。
私達は参加者が会議場とワークショップ会場、また会議に関連したソーシャルイベントにて、このルールに従うことを望みます。